避障优化策略
融合视觉与LiDAR数据,实现精确可靠的避障策略。
极对数自动驾驶具备三维实时重建、不依赖高精地图、采用端到端的多模态自动驾驶系统,该系统已搭载于微型乘用车形成自动驾驶教学平台,并提供给多家高校进行教学演示和自动驾驶开发,同时也搭载于自动化农具应用于智慧农业。
极对数的硬件和软件经过协同设计,带来了出色的三维重建能力。 先进的摄像头、激光雷达和性能强大的处理器,再加上基于大数据的深 度学习技术,使得极对数能够高效地实时获取和处理三维场景数据,并 生成高精度的三维模型用于自动驾驶中。
这种能力在自动驾驶领域具有重要的应用价值,可以帮助车辆高效 地感知周围环境,实现精准的定位和路径规划,从而提高行驶安全性和 效率。
端到端自动驾驶技术是指将感知、预测、规划和控制等功能融合到一个深度学习模型中,直接从传感器输入到车辆控制输出。
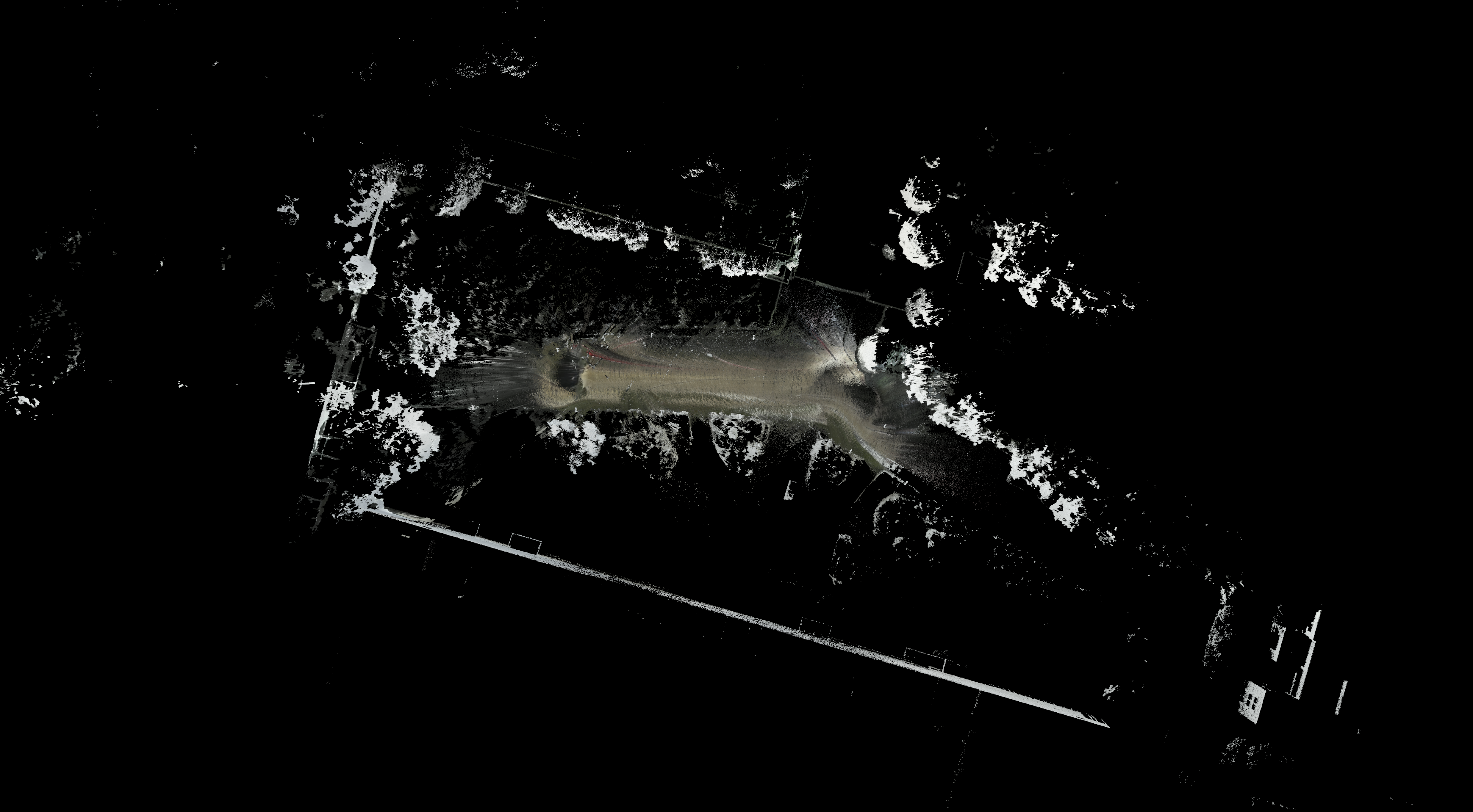
E2E-LiDAR-IMU-Camera融合框架,能够实现稳健且准确的实时状态估计,同时实时三维重建地图。
融合路径规划应对复杂场景。

融合视觉与LiDAR数据,实现精确可靠的避障策略。

融合多传感器数据,实现实时高精度三维空间重建。

深度强化学习与A*算法实现智能安全路径规划。








